MorphingSkin: A skin-like platform that integrates multimodal hydraulic actuators based on flexible electroosmotic pumps
Tianyu Yu, Peisheng He, Bob Tianqi Wei, Chenyuheng Wang, Xueqing Li, Xuezhu Wang, Yao Lu, Wei Yue, Megan Teng, Zihan Wang, Liwei Lin, Haipeng Mi, Qi Lu, Lining Yao
UIST 2025 🏆BEST PAPER AWARD!
https://doi.org/10.1145/3746059.3747685
PDF
ABSTRACT
Interactive surfaces have garnered significant attention in Human-Computer Interaction, with fluid-driven actuators being a promising actuation technology due to their flexible form factors and multimodal interactivities. However, traditional fluid-driven systems typically rely on bulky and noisy electromechanical hardware, limiting their portability and practicality. While recent work has introduced compact hydraulic actuators like electroosmotic pumps (EOPs) in haptic devices, their potential for building multifunctional interactive surfaces remains largely unexplored.In this work, we present MorphingSkin, a skin-like platform that integrates multiple, multimodal hydraulic actuators using flexible EOPs as lightweight and self-contained fluidic actuators. We introduce the architecture of MorphingSkin and its versatile design space for multimodal actuation in force, shape, and optical domains. We demonstrate interactive and robotic applications that integrate multiple actuators working collectively within a single MorphingSkin device. Through this work, we envision the future of using MorphingSkin technology for interactive surfaces that integrate multimodal actuation capabilities.
MorphingSkin is a soft, skin-like interface that changes shape, weight, light, and force—designed for future wearables and robotics.
Most wearable interfaces and robots are rigid and limited in expression. We explored how a soft, fluidic surface could expand interactive possibilities.

Key Components (a)
EOP Layer (Center): The engine. This layer pumps fluid when electricity is applied.
Output Layer (Pink): Where the visible action happens—this layer inflates, moves, or changes shape.
Reservoir Layer (Blue): Stores extra fluid for use when needed.
Connection Layer: Channels that guide fluid between layers.
Working Fluid Path: Fluid moves between layers to create actuation.
All layers are soft and stretchable, allowing the whole system to bend and conform to surfaces.
Fluid Flow Configurations (b)
We designed three layout styles for how fluid can move between the layers:
Collinear
All layers are stacked on top of each other. Easy to build but thicker.
Coplanar-Front
Output and reservoir are on the same side. Good for saving height.
Coplanar-Rear
Output layer is placed more freely, allowing more design flexibility.

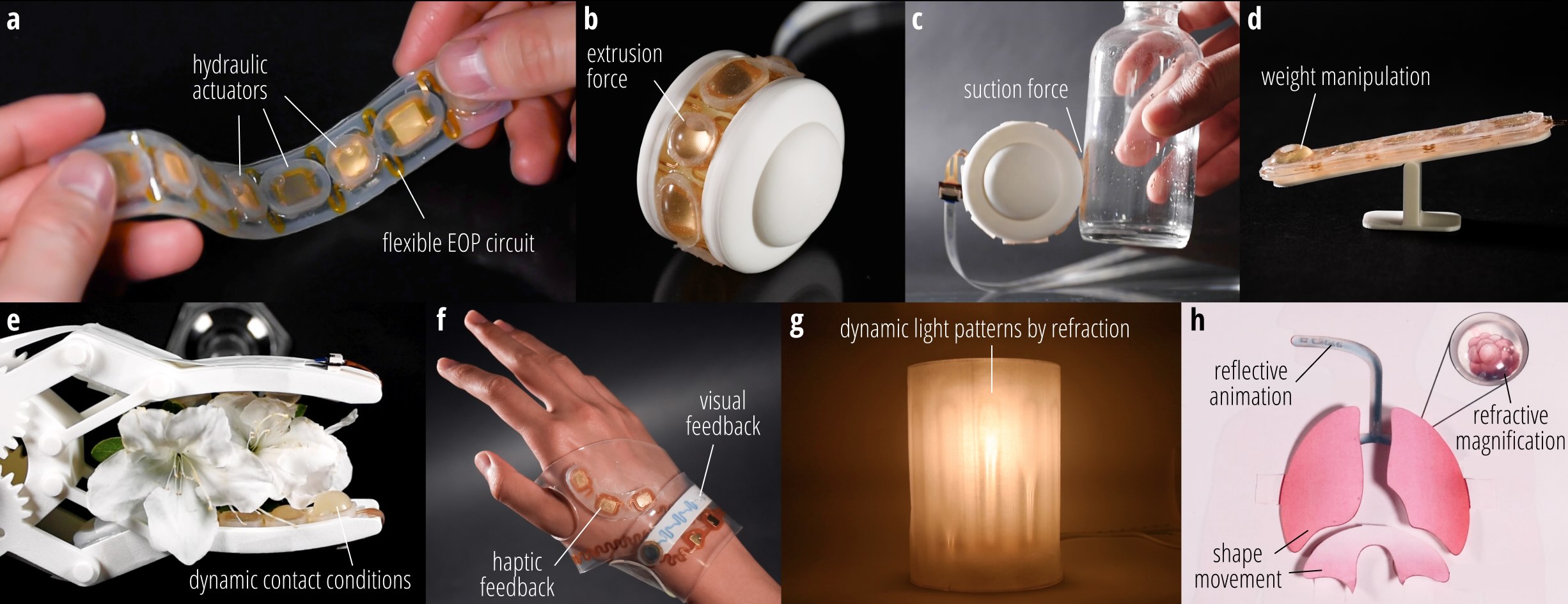
Multimodal Actuation: 4 Ways MorphingSkin Moves
MorphingSkin can create different types of physical effects—all using fluid inside soft layers. We designed and tested 4 actuation types:
1. Force
Extrusion: The dome inflates outward to push things (like lifting a weight).
Suction: The dome pulls inward, creating suction to stick onto objects.
2. Shape
Kinematic Motion: Inflating a dome triggers parts of a structure to move, like a hinge opening.
Kirigami Surface: A soft dome pushes open a patterned surface to create texture changes.
3. Optics
Reflection: Fluid fills channels to create visible shapes (like letters) without lights.
Refraction: A clear dome changes shape to focus or blur light—like a soft lens.
4. Weight
By pumping fluid between different domes, we can shift the internal weight of the system—like tilting a seesaw.

Adaptive Robot Gripper Skin
We used MorphingSkin to cover the inside of a robot gripper's fingers. Each finger contains four soft actuators in a row, which can:
Inflate (extrusion) to provide soft pressure
Deflate (suction) to gently pull or stick
Stay neutral for firm grip
This lets the gripper adjust how it touches different objects:
🧁 Soft Contact: Inflates to gently hold fragile items like cake or flowers without squishing them.
🍫 Suction Contact: Uses suction to lift delicate or hard-to-grip objects, like chocolates or stacked plates.
🫙 Hard Contact: When no actuation is applied, the stiff structure provides a strong grip for heavy items like jars.

Desktop Companion Robot
We built a small desktop robot using MorphingSkin as its soft outer shell. Around its body, we placed a ring of soft actuators that can inflate (push) or suck (pull).
These soft movements allow the robot to show emotions through motion:
Calm: The actuators slowly rise and fall like breathing, making the robot feel alive and relaxed.
Frightened: When touched suddenly, it uses suction to shrink and stick to the table—like it’s scared and trying to hide.
Excited: The robot inflates on one side and lifts itself to roll, showing playful energy.
Mischievous: It uses suction to grab nearby objects and then pushes them away, like it’s teasing you.
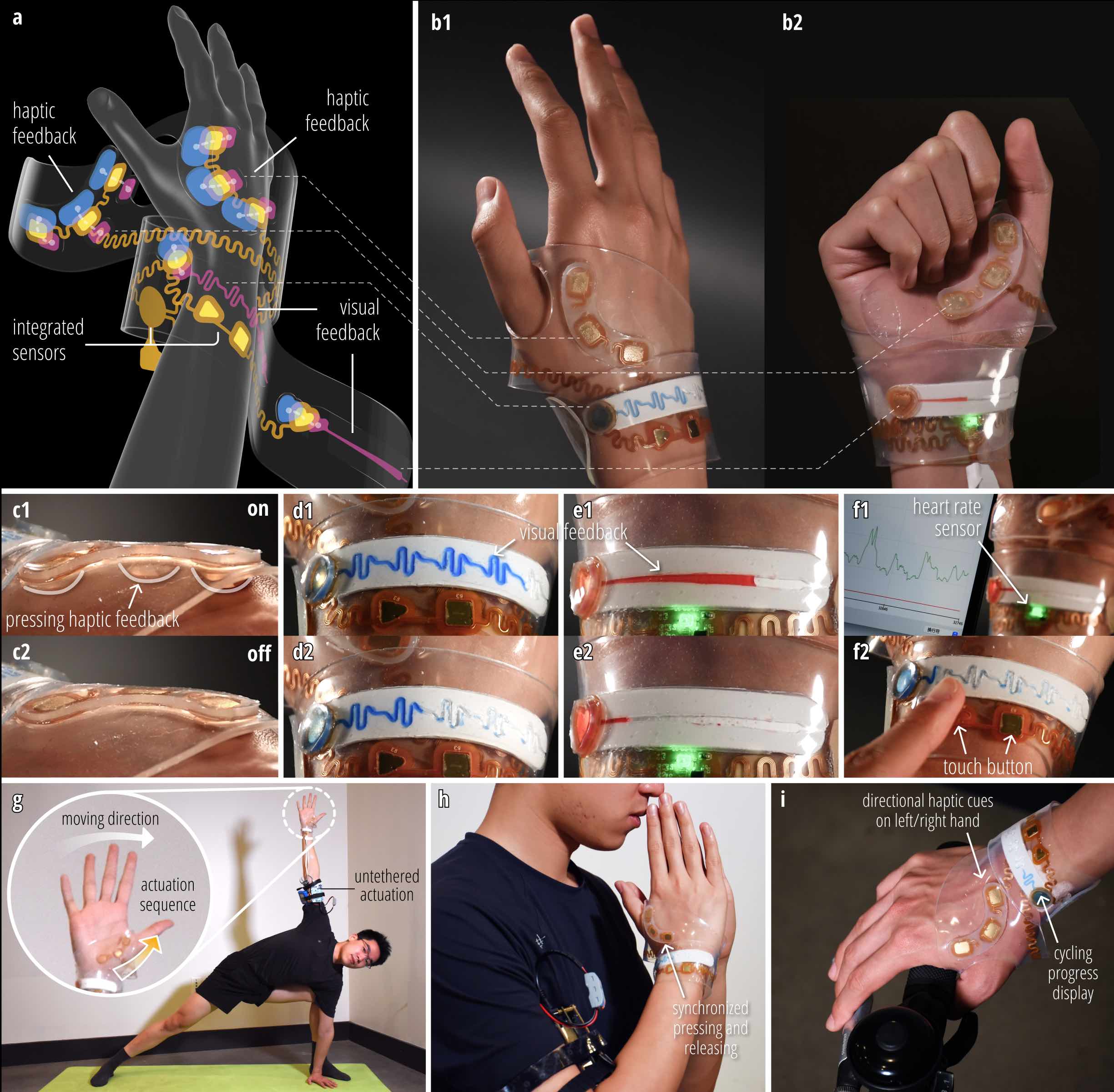
Multimodal Wearable Wristband
We designed a soft, flexible wristband using MorphingSkin that combines haptic feedback, visual feedback, and sensors—all in one device.
What It Can Do:
Haptic Feedback (c)
Multiple soft actuators gently press on your wrist in patterns—like a rhythmic tap or wave—to guide your attention or actions.
Visual Feedback (d–e)
Instead of using lights, we use colored fluid channels:
A patterned blue bar for signals like timers.
A red linear bar to show progress or heart rate.
Sensors Built-in (f)
Includes a heart rate sensor and two touch buttons, allowing interaction without screens or noise.
Use Scenarios (g–i):
Yoga: Gives directional feedback (left/right hand) during movement.
Meditation: Gently presses in sync with your breathing to help you relax.
Cycling: Shows progress visually while guiding you with wrist-side haptics for turns.

Interactive "Magic Page" for Educational Books
We created a flexible, animated page insert for anatomy books using MorphingSkin. This “magic page” brings static diagrams to life by adding movement and light effects—helping users learn through touch and motion.
What It Can Do:
Reflective Animation (d)
Blue fluid flows through trachea-shaped channels, visually simulating breathing airflow.
Refractive Magnification (e–f)
Clear domes inflate and deflate to mimic alveoli expanding and shrinking, bending light to magnify the printed details underneath.
Shape Movement (g–h)
Inflatable domes push up parts of a paper overlay to simulate lungs rising and falling, like real chest movement during breathing.
How It Works (a–c):
The page is thin and foldable like regular paper.
You can unroll it, place it inside a textbook, and overlay it with themed content cards.
Each actuation is synchronized to show how different body parts work together.

Dynamic Lampshade with Light-Shaping Skin
We designed a soft, responsive lampshade using MorphingSkin. It wraps around a light source and uses inflatable lenses to control how light moves and looks.
What It Can Do:
Shape-Changing Lenses (a–b)
When inflated, the soft actuators curve outward, turning into convex lenses that bend light in real time.
Ground Projection (c)
As light passes through the lenses, it creates shifting patterns on the ground—like moving spotlights.
Diffuser Animation (d)
When aimed at a diffuser film, the lenses cast multiple soft lines of light that grow and shrink as the lenses inflate.
Kirigami Texture Effect (e)
A laser-cut kirigami layer reacts to the shape change, altering the texture and shadows of the light across the space.
Fabrication

(a-c) Assembling the flexible EOP circuit. (d) Cross-section photography of the coated EOP layer. (e) Cross-section illustration of a single layer of EOP electrode.

Coating the EOP layer with (a-f) silicone material and (g-i) VHB tape.
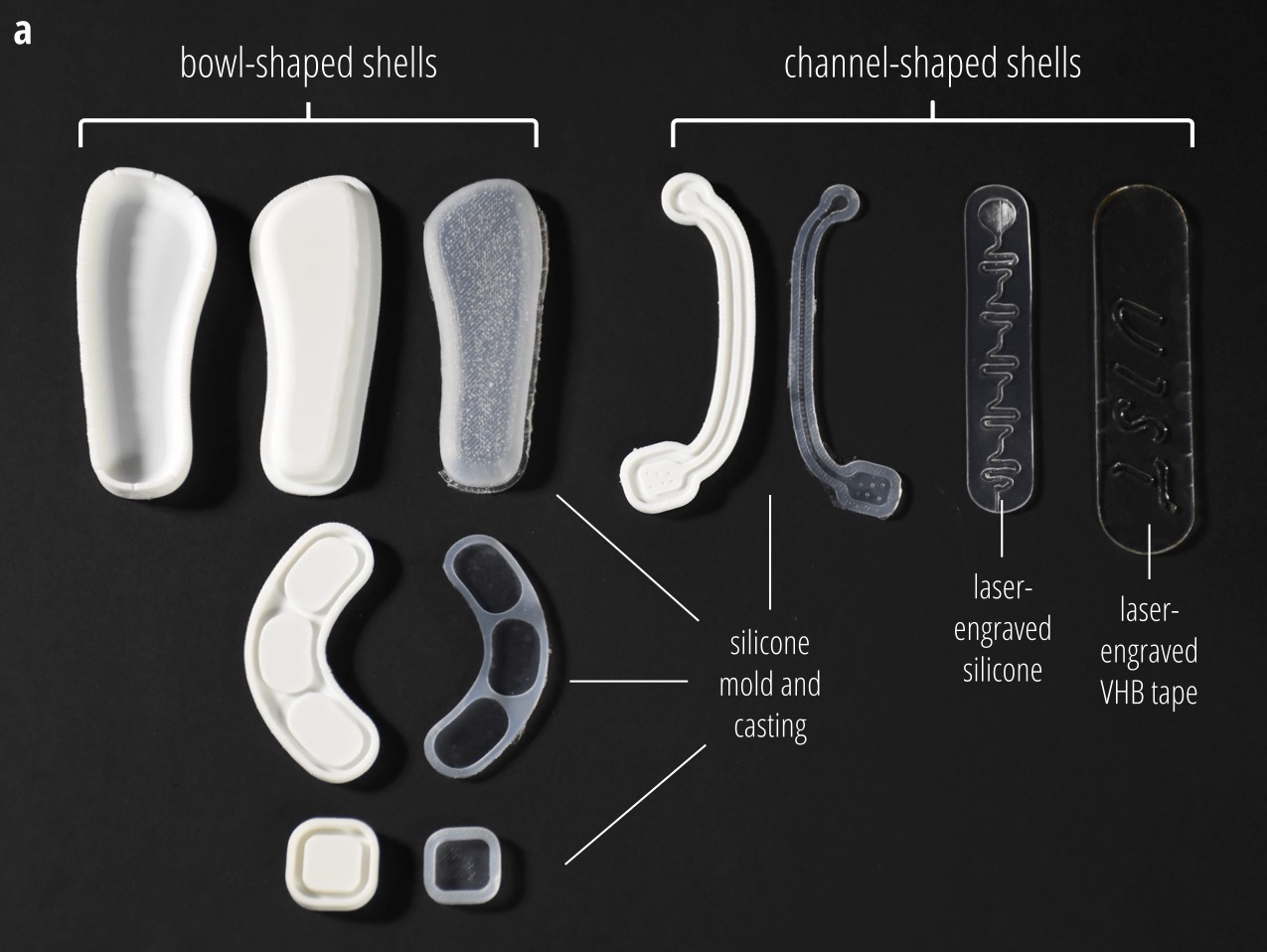
Design and fabrication of the elastic shells.

Bonding of the elastic shells

Design and fabrication of the elastic shells.
Driving hardware system

Driving hardware system that contains 16 programmable output ports with pre-set output voltages ranging from 150V to 250V, enabling untethered operation of MorphingSkin devices.
Technical Evaluation

the open flow rate and the blocked pressure of the EOP device.

the power consumption,h eat generation, and durability of a typical and simple MorphingSkin test device.

the stretchability and thefailure test of a typical MorphingSkin test device.

